Understanding parameters
Background
parameter는 노드의 configuration값이다.
Tasks
setup
ros2 run turtlesim turtlesim_noderos2 run turtlesim turtle_teleop_key
param list
ros2 param list
param get
param get을 사용하면 현재 parameter의 type, value를 확인할 수 있다.
# ros2 param get <node_name> <parameter_name>
ros2 param get /turtlesim background_g

param set
param set을 사용하면 parameter의 value도 바꿀 수 있다.
# ros2 param set <node_name> <parameter_name> <value>
ros2 param set /turtlesim background_r 150

param dump
현재 node의 parameter값을 yaml파일로 저장할 수 있다.
이렇게 configuration을 저장하여 나중에 redirect할 수 있다.
# ros2 param dump <node_name>
ros2 param dump /turtlesim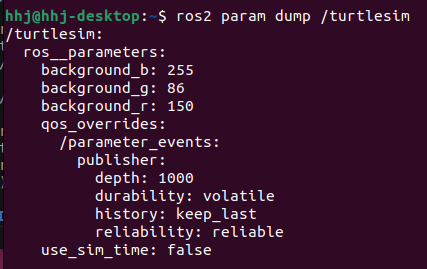
더보기
근데 왜 보이기만 하고 저장은 안될까 ㅠ..
param load
저장한 yaml파일을 set한다.
# ros2 param load <node_name> <parameter_file>
ros2 param load /turtlesim turtlesim.yaml
load parameter file on node startup
node를 시작할 때부터 저장된 parameter값을 사용한다.
# ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>
ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim.yaml
ROS2_Humble Documentation : https://docs.ros.org/en/humble/Tutorials/Beginner-CLI-Tools.html