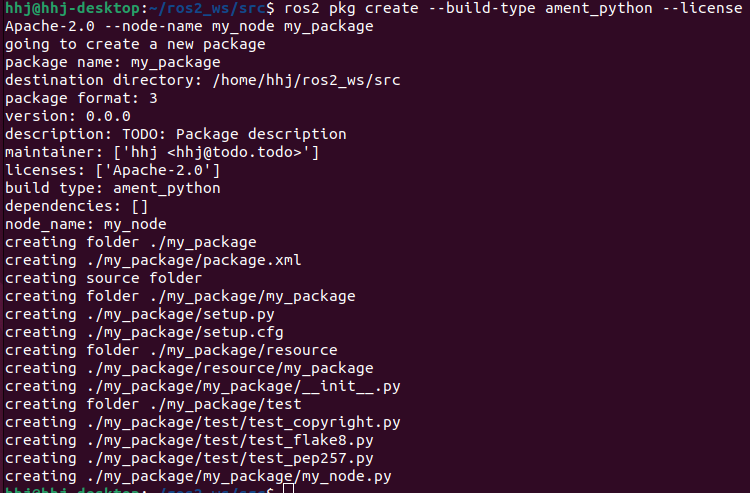
Creating custom msg and srv filesTasksCreate a new package.msg, .srv를 만들어 각각의 패키지에 생성할 것이다. 패키지는 같은 workspace에 있어야 한다.pub/sub, service/client 패키지를 생성할 것이기 때문에 이또한 같은 패키지에 생성해야 한다.ros2 pkg create --build-type ament_cmake --license Apache-2.0 tutorial_interfaces tutorial_interface는 CMake기반의 패키지이지만 message, service를 사용할 수 있는 패키지 유형에 제한은 없다.CMake패키지에서 custom interface를 만들고 Python node를 사용할 수 있다..msg..